Qastor the evolution of pilotage software
How it started
Qastor was first released in 1998 and has become the benchmark in pilotage software in the years to follow.
The software has evolved from being just a navigational aid to an essential tool to support the day to day activities of the marine pilot.
It was around the millennium change that a number of manufacturers started to produce portable devices to relay the ships positioning data to a laptop with Qastor. The relay device is also known as the Pilot Plug. The combination of device, laptop and software is referred to as Portable Pilot Unit (PPU).
The introduction of the Automatic Identification System (AIS) marked further enhancements to both device and software.
Devices had to relay the AIS messages and the software was modified to give the pilot situational awareness.
It was during this period that QPS launched the first AIS vessel tracking web-site, AIS-Live.

AIS often revealed shortcomings in the vessel’s Global Navigation Satellite System (GNSS) installation and positioning quality.
Vessel dimensions definitions like antenna offsets, length, beam and draft are also prone to errors.
It became increasingly important for the pilot to work with an independent GNSS solution as opposed to using the relayed vessel positioning.
High end devices evolved from using one- to multiple satellite systems (GPS, Glonass, etc.) and various correction methods to enhance the positioning accuracy.
Qastor proved that further developments were needed to enhance the vessel heading accuracy to improve prediction, lock- and mooring operations. Motion sensors were incorporated in the high end devices as a result. Rate of Turn (RoT) and heading are interestingly often more important now than the absolute accuracy.
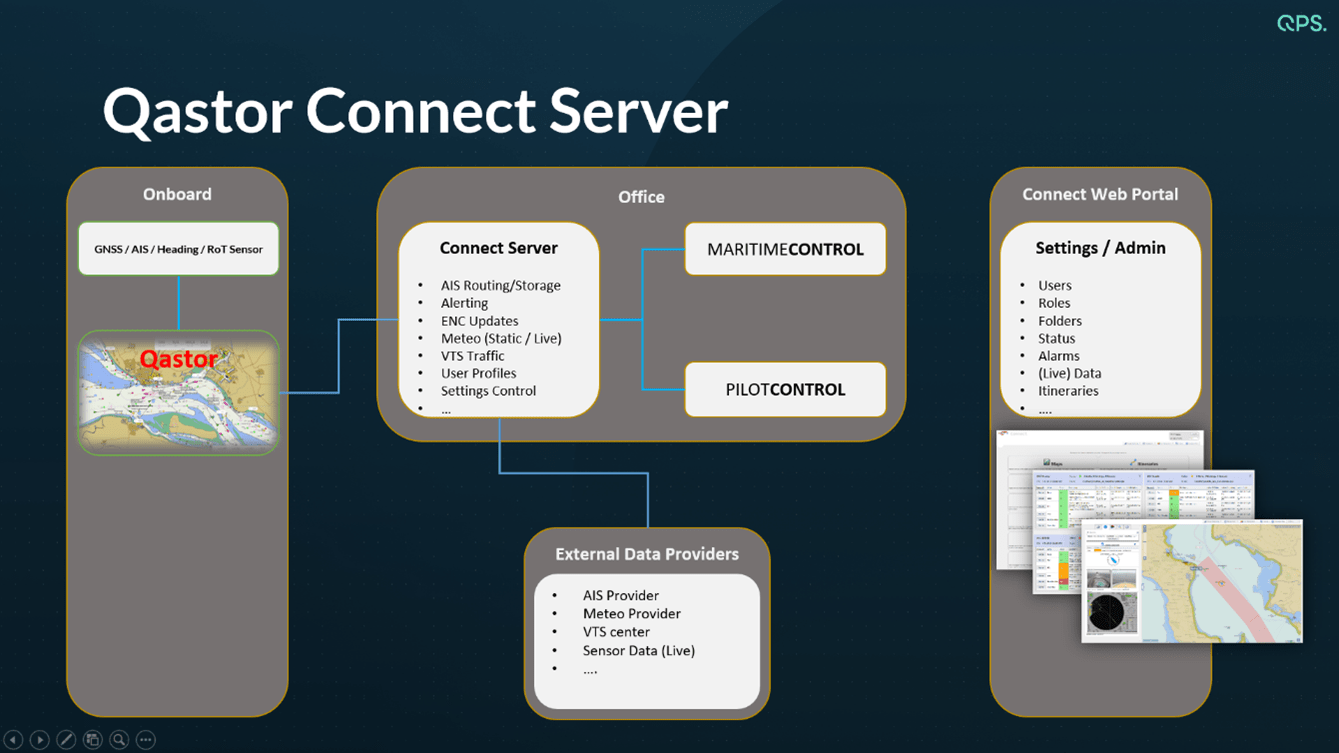
The Connect Server was created to relay external data modalities from multiple sources into a single stream to Qastor. Information from Vessel Tracking Systems (VTS), meteorological-, tidal- and under keel clearance (UKC) data are examples of this.

Next generation
Qastor 2.5 was feature complete to the requirements of the day but new developments with respect to the Internet of Things, Cloud computing and support for smartphones and tablets made it reach its architectural boundaries. A new generation was required to be future proof, expandable, easy to use and operable on any mainstream operating system.
2019 marked a new chapter in the Qastor story when the Dutch- and Belgium pilot organizations, Loodswezen and DAB, chose to join QPS in developing Qastor 3.
A core team of pilots, from Loodswezen and DAB, act as stakeholders in the development process, having full access to the QPS issue tracking and planning ecosystem to provide feedback and help prioritizing.
The development is following the Agile Scrum methodology with biweekly reviews with the stakeholders and releases which are handed to the core team for field testing.
Many other pilots were granted access to the intermediate releases in order not to miss out on requirements and features.
A commercially available release is made available on the AppStore and the QPS site typically every quarter. Extensive pre-release field testing of all use cases is key.
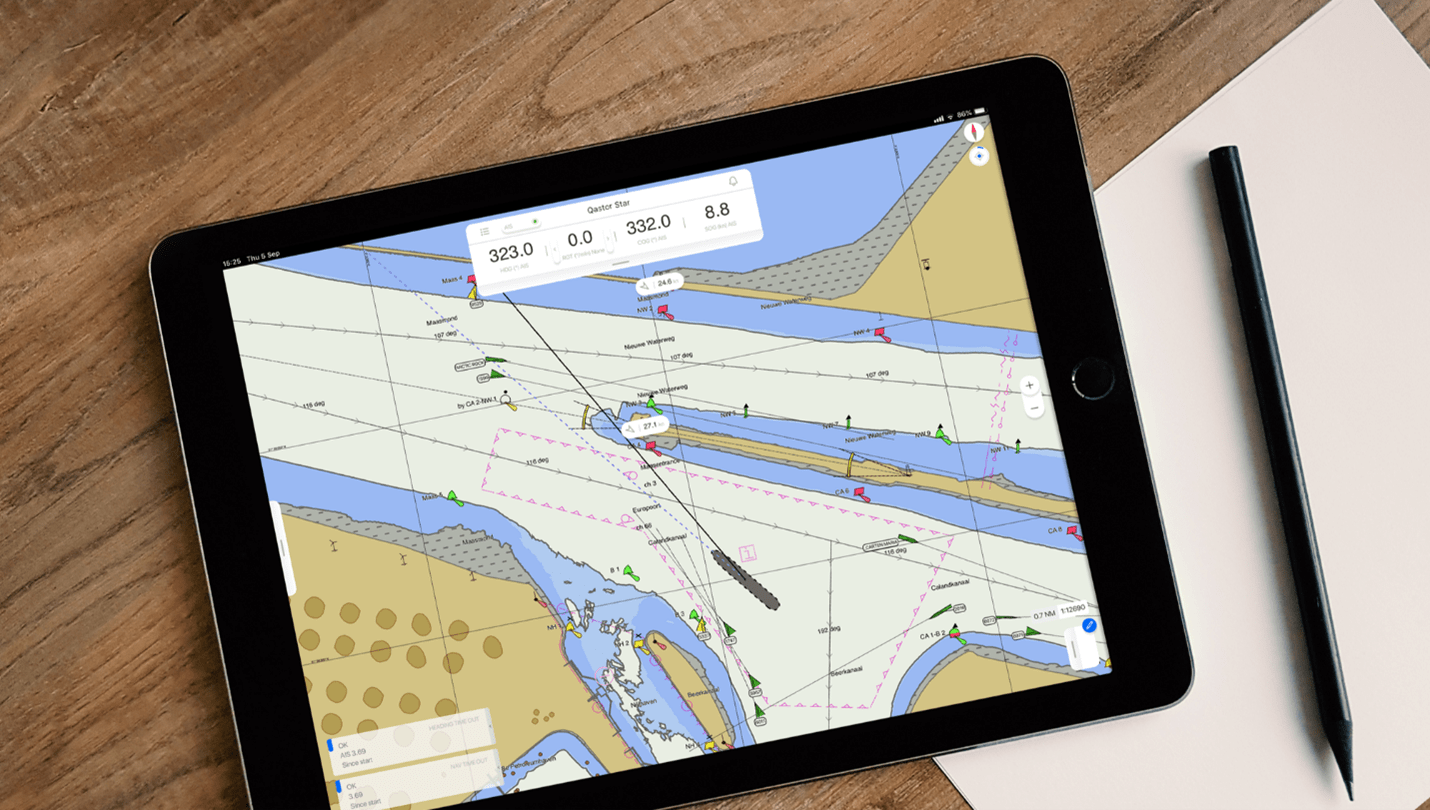
Qastor 3 comes with a completely new graphical user interface (GUI). The GUI was designed with the input from the pilots and third party design specialists from Studio Naam.
This interesting blend of pilotage- and GUI domain knowledge, makes Qastor intuitive and easy to use, whether it is operated on a Windows laptop, iPhone or iPad.
The application is fully localized, meaning that it supports multiple languages in many writing systems (alphabetic, Arabic, Chinese, etc.).
New languages may be easily incorporated by means of translation files which can be verified by maritime professionals as standard translation often proves to give insufficient results.
Connect Server interaction, like chart updates and meteorological information has been fully integrated in the application. This allows for a seamless user experience whilst accessing external data modalities. An example is that a pilot can easily update charts when a chart notification is signaled.
Connect can be used to store personal profiles and share them on other devices. Organizations can share preferred settings among their pilots as well.
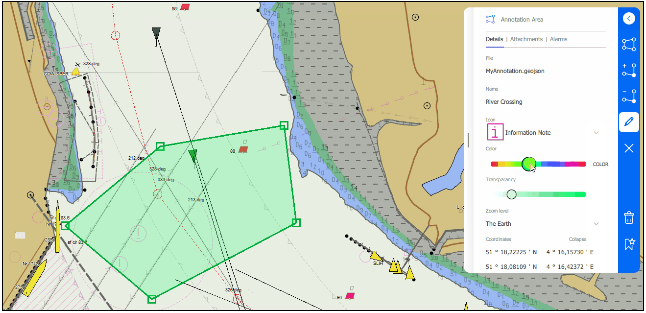
Proven 2.5 methods and algorithms, like the ENC chart rendering engine, are reused in Qastor 3.
The chart engine itself is being kept up to date with the latest developments regarding the IHO S-100 standard. An example is the S-102 bathymetric surface layer.

How about Qastor 2.5?
Qastor 2.5 is still a very popular application.
It has a proven track record, is feature rich, well embedded into the workflow of many pilot organizations and it can still be purchased.
Updates will be released when mission critical modifications are required.
Both 2.5 and 3 are compatible with the same Connect server where Qastor 3 may contain more features like personal profiles.
The versions can run parallel to on a Windows device.
Settings in 2.5 can easily be ported to 3 in order to be able to compare the two versions next to each other.
Conclusion
The last 25 years has shown quite some innovations for both positioning devices as in pilotage software.
Positioning requirements result in device upgrades which then need to be supported by the software.
The software needs to extract the maximum potential of the GNSS device to allow the pilot to make operational decisions affecting the progress of the journey.
Other factors that affect the software evolution are the constantly changing range of devices and platforms the application needs to support, the internet of things, cloud computing and connectivity to the harbor infrastructure.
QPS is committed not just to follow the trends but to keep pushing the boundaries to provide the pilot the best navigational tool.
Let us guide you.